Our research on Software Quality and Human-Computer Interaction focuses on three main areas: Eye Traking Applications, Human-Machine Interaction, and Gamification.
Members and associates of the Software Quality and Human-Computer Interaction Laboratory are working on the following research activities:
Eye Tracking Applications
Our lab is pioneering the integration of eye-tracking technology to revolutionize human-computer interaction, usability evaluation, and adaptive system design. By capturing real-time gaze data, we gain deep insights into users’ attention distribution, cognitive load, and decision-making processes across a range of environments, from aviation interfaces to immersive virtual reality (VR). Our research explores how eye-tracking can optimize information presentation, enhance situational awareness, and personalize user experiences by dynamically adjusting interfaces based on visual attention. By leveraging AI-driven analytics, we push the boundaries of predictive modeling, distinguishing between voluntary and involuntary blinks, forecasting user comprehension, and anticipating gaze patterns. These advancements enable the development of smarter, more intuitive systems that respond seamlessly to users’ needs, improving training simulations, assistive technologies, and high-performance interface design.
Find out more here.

Human Machine Interaction
Our lab is working on human-machine interaction (HMI) research, developing adaptive systems that enhance user experience and efficiency in high-stakes environments. By integrating real-time eye-tracking, physiological sensors, and performance analytics, we gain a comprehensive understanding of how users interact with complex interfaces under varying conditions. Our research focuses on optimizing information presentation, dynamically adjusting interfaces based on users’ cognitive and physiological states to reduce overload and improve decision-making. Through studies on adaptive cockpit displays and drone control systems, we refine HMI designs that intuitively respond to user needs, ensuring seamless and intelligent interactions between humans and technology. By leveraging biometric data and user feedback, we advance the field of intelligent, context-aware systems, setting new benchmarks for safety, usability, and performance in aviation and beyond.
Find out more here.



Gamification
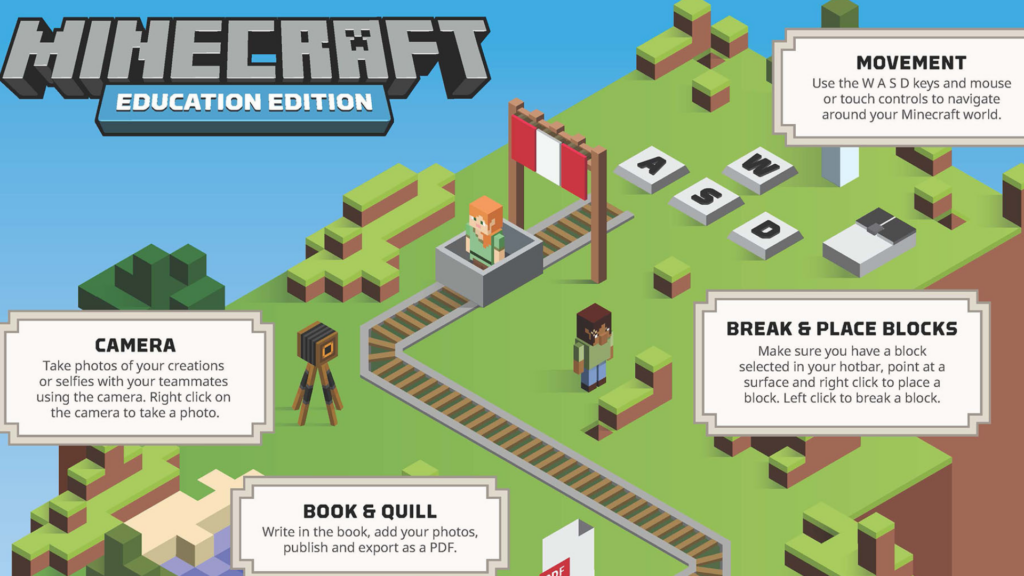
Our lab explores the power of gamification to enhance learning, training, and decision-making by integrating game-based mechanics into educational and operational environments. By leveraging platforms like Unity and Minecraft Education, we create immersive experiences that engage users while reinforcing critical skills in STEM, problem-solving, and collaboration. Serious games provide an interactive and motivating approach to learning, allowing users to develop expertise in a risk-free, yet realistic setting. Beyond education, we harness gamification to optimize training simulations, improve situational awareness, and study complex behaviors within virtual environments. By combining high-fidelity simulations, real-time physics, and AI-driven interactivity, we craft experiences that foster engagement, adaptability, and deep learning. Our research focuses on gamification, demonstrating its potential to transform traditional methods of learning and decision-making into dynamic, personalized, and highly effective processes.
Find out more here.